
ИБР-02: Пример использования

ИБР-02: Пример одноплоскостной балансировки электродвигателя со шкивом на валу.
Параметры электродвигателя:
-мощность 3 кВт;
-частота вращения 3000 об/мин;
-масса ротора 5 кг.
1.Запускаем двигатель и с помощью встроенного стробоскопа определяем частоту вращения ротора.

Полученное значение частоты вращения ротора n составляет 2999 об/мин.
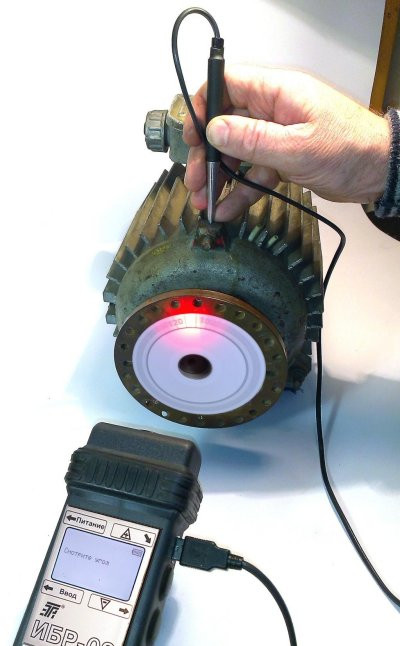
2. Измеряем виброскорости (СКЗ) опоры на частоте вращения ротора, последовательно устанавливая вибродатчик на подшипниковый щит в радиальном вертикальном и радиальном горизонтальном направлениях.
 В нашем случае значение виброскорости в вертикальном направлении составляет 10,0 мм/с, а в горизонтальном - 5,8 мм/с.
В нашем случае значение виброскорости в вертикальном направлении составляет 10,0 мм/с, а в горизонтальном - 5,8 мм/с.

Наибольшее значение виброскорости получено в вертикальном направлении, поэтому все последующие измерения при балансировке ротора будем производить в этом направлении.
3. Выбираем вид балансировки (в данном случае одноплоскостная)

4.Устанавливаем вибродатчик в вертикальном направлении и измеряем виброскорость V10 на частоте вращения n.

Полученное значение виброскорости V10 составляет 10,8 мм/с.
5.С помощью стробоскопа определяем фазовый угол виброскорости
∠ V10, учитывая, что место на разметке лимба, соответствующее определяемому углу, находится в одной осевой плоскости с датчиком со стороны датчика.

Полученное значение фазового угла виброскорости ∠ V10 составляет 180 градусов
6.Останавливаем двигатель и значения виброскорости V10 и фазового угла виброскорости ∠V10 вводим в память прибора.

7.Вводим в память прибора значения массы ротора и радиуса установки пробной массы Мп1.
После этого на дисплее появится величина расчетного значения пробной массы Мп1р.

8.Подбираем пробную массу, например, гайку (в данном случае 3 г) и устанавливаем её на шкив на радиальной линии, проходящей по возможности перпендикулярно вектору виброскорости V10.
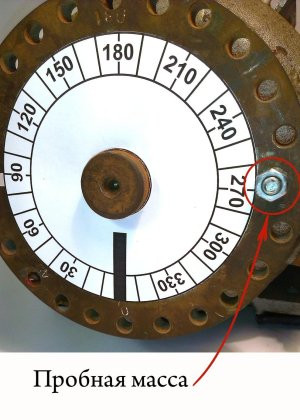
В нашем примере угол установки пробной массы ∠Мп1 составляет 270 градусов
9.Фактические величины пробной массы Мп1 и угла установки пробной массы ∠Мп1 вводим в память прибора

10.Запускаем двигатель и измеряем виброскорость на частоте вращения V11 и фазовый угол виброскорости ∠V11.

В нашем примере значение виброскорости V11 составляет 9,9 мм/с, а значение фазового угла виброскорости ∠V11 – 135 градусов.
11.Останавливаем двигатель и вводим в память прибора значения виброскорости V11 и фазового угла виброскорости ∠V11.

12.Снимаем пробную массу.
13.Вводим в память прибора значение радиуса установки корректирующей массы.
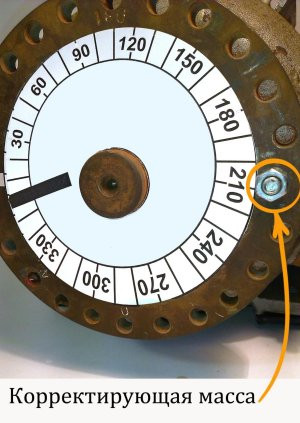
14.После обработки введенных данных прибор выводит на дисплей величины корректирующей массы Мк1 и угла её установки ∠Мк1.

В нашем примере величина корректирующей массы Мк1 составляет 4 г, а угол установки корректирующей массы (угол коррекции) ∠Мк1 - составляет 208 градусов
15. Устанавливаем корректирующую массу на плоскость коррекции.
16.Включаем двигатель и измеряем виброскорости на частоте вращения ротора в вертикальном и горизонтальном направлениях.

В нашем случае значения виброскоростей составили: вертикальномнаправлении – 1,2 мм/с, а в горизонтальном - 1,0 мм/с.

Результат балансировки ротора считаем удовлетворительным, так как полученные значения виброскоростей не превышают нормируемое значение для данной машины.
Скачать pdf-версию примера балансировки при помощи ИБР-02 можно тут

 Как выбрать идеальный крепежный элемент: разбираем обозначения и стандартыКрепежные элементы – это основа любого соединения, независимо от того, строите ли вы дом, ремонтируете автомобиль или создаете металлоконструкцию. От правильного выбора зависит прочность, безопасность и долговечность крепежа. Однако на рынке представлено огромное количество: винты, болты, гайки и шпильки, отличающиеся по стандартам, материалам и назначению. Чтобы правильно подобрать крепеж, важно понимать основные стандарты и обозначения, которыми маркируются эти изделия.Полная версия статьи
Как выбрать идеальный крепежный элемент: разбираем обозначения и стандартыКрепежные элементы – это основа любого соединения, независимо от того, строите ли вы дом, ремонтируете автомобиль или создаете металлоконструкцию. От правильного выбора зависит прочность, безопасность и долговечность крепежа. Однако на рынке представлено огромное количество: винты, болты, гайки и шпильки, отличающиеся по стандартам, материалам и назначению. Чтобы правильно подобрать крепеж, важно понимать основные стандарты и обозначения, которыми маркируются эти изделия.Полная версия статьи